a few sketches

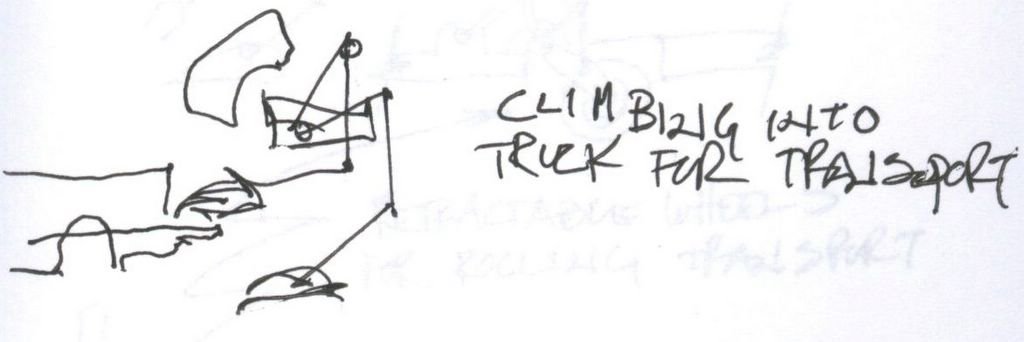
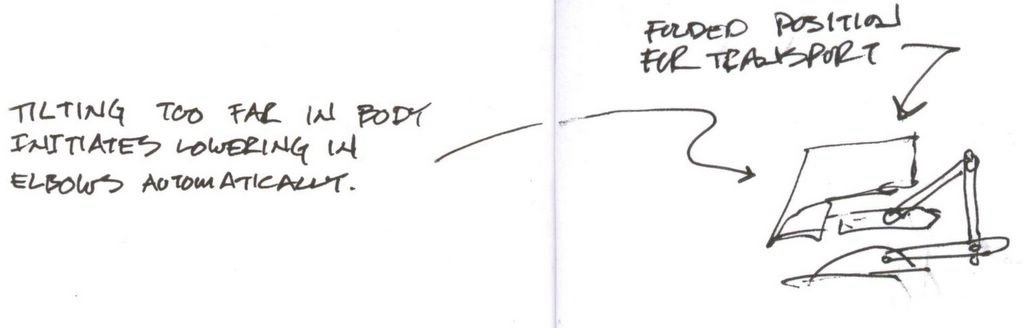
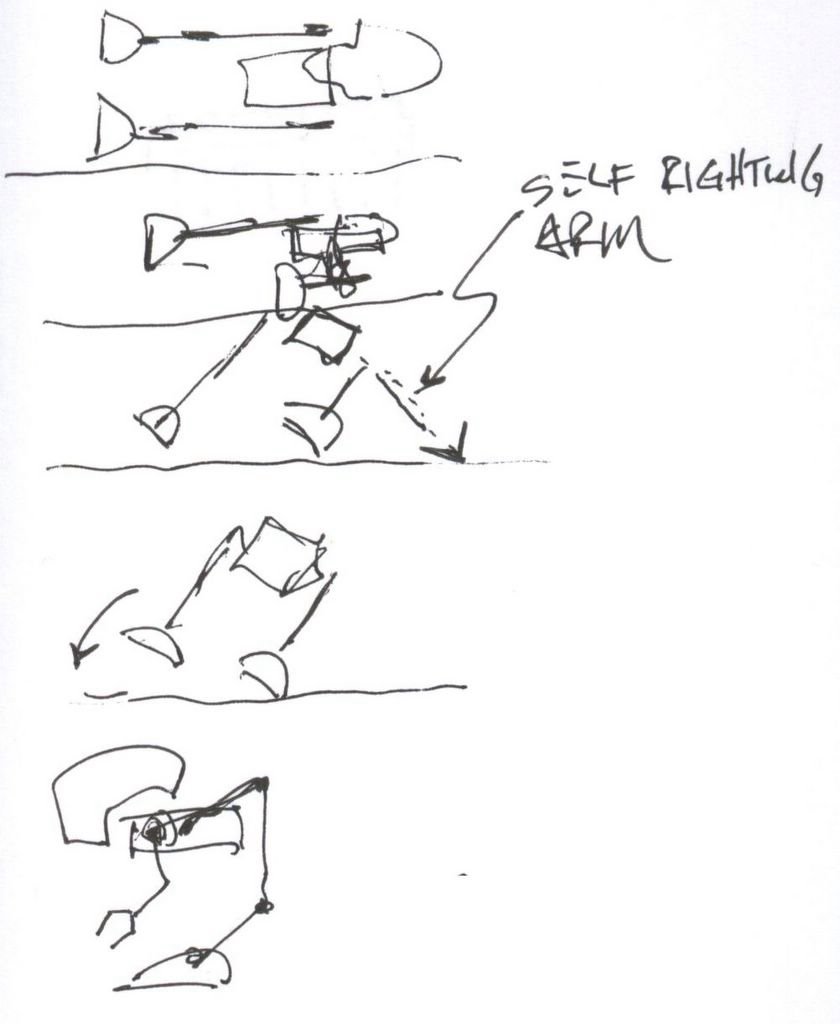
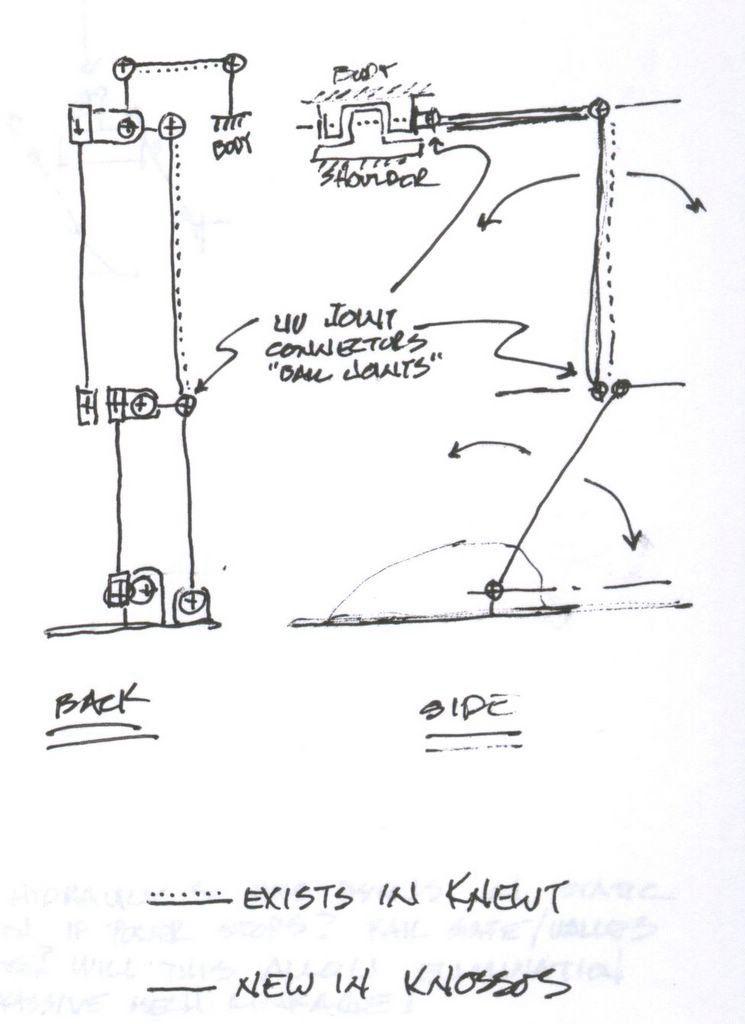
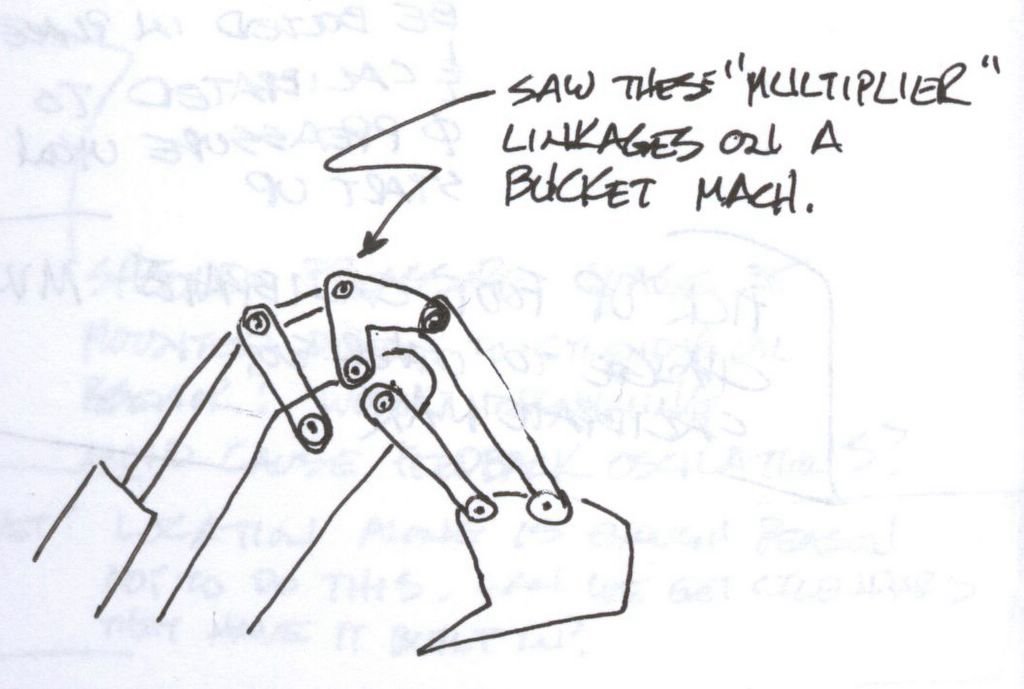
While on vacation I managed to sketch of few ideas concerning the scaling up of Knewt. This image shows an extra joint at the top right. In order to fold Knossos enough to get it into trucks for transport, this extra joint is needed. It has other advantages as well.
posted by Keith Rowell at
6:59 PM
|
0 comments
![]()