The
Land Walker seems to personify many of the objectives we are shooting for. Be sure to check out the movies. This amazing walking bot even has pneumatic cannons that fire rubber balls.
Some of our objectives not addressed by Land Walker are:1. Originality. We'ld like to break new ground artistically. (Not rely on previous science fiction and 3D games such as "Mech Warrior" or "Star Wars").
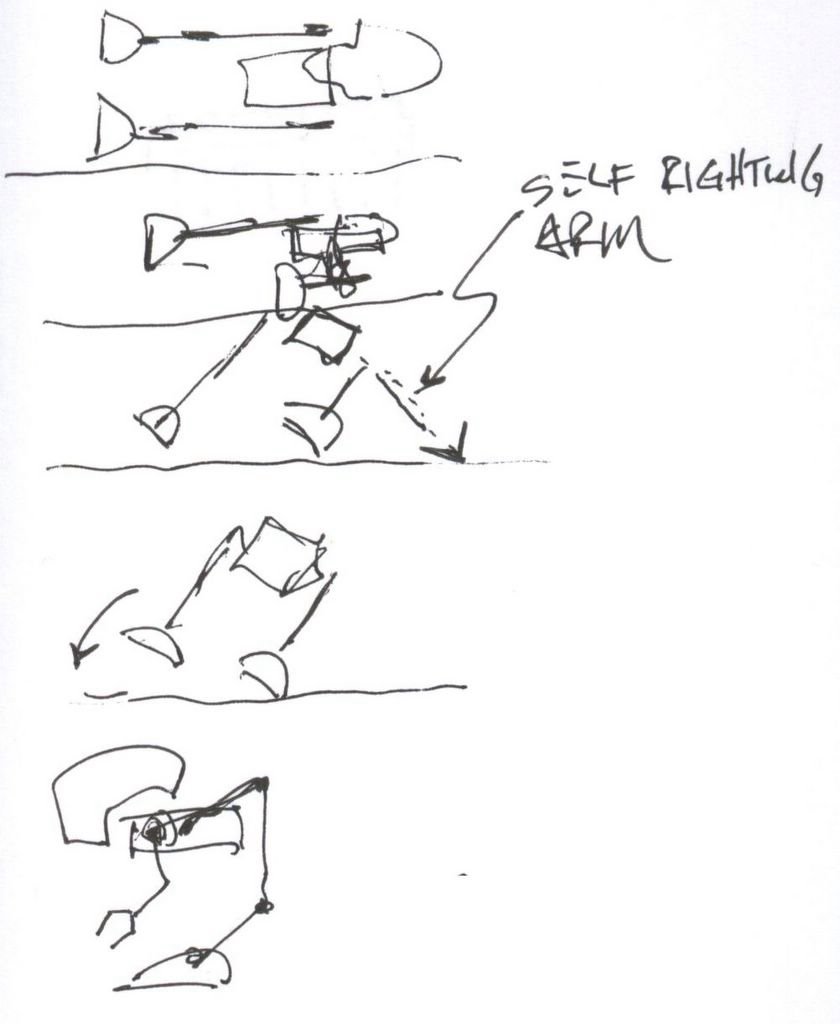
2. Very compelling motion. ( The Land Walker's motion is very clever and seemingly pretty stable, but it doesn't pick up it's feet, it "shuffles" instead. It does the job, but is somehow less than satisfying).
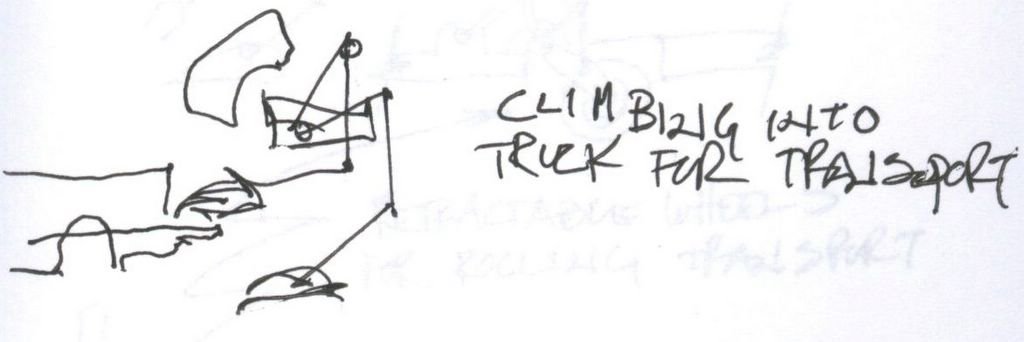
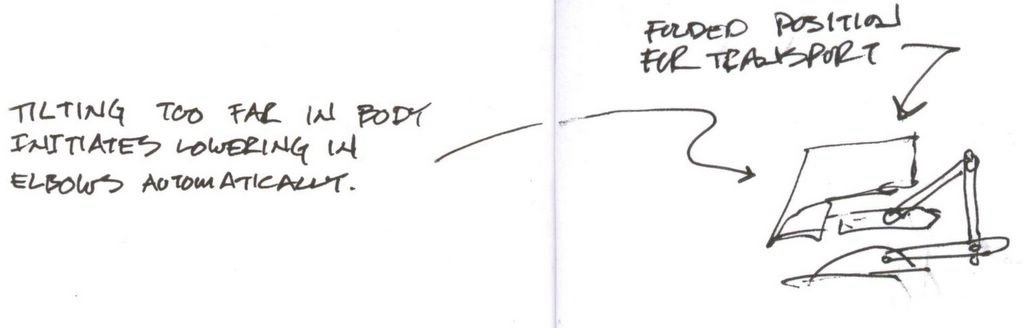
3. Transportability. ( It's not obvious that there's a convenient way to put this in a truck and take it to an event ).
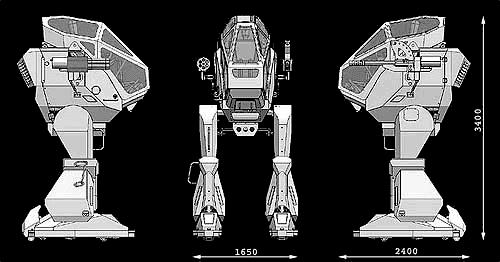
Some of our objectives that are addressed by Land Walker are:1. Large size. (10 feet is a good size, very impressive presence. The larger the better.)
2. Passenger carrying. ( We would like to have the option to carry one or more passengers)
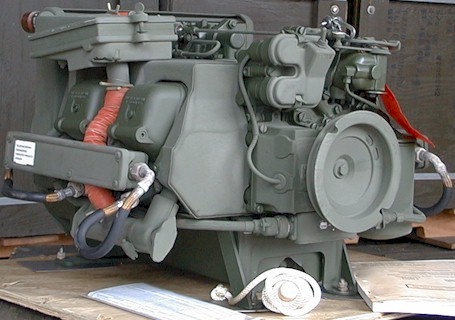
3. Self contained power. ( There are no cables hanging from the bot leading to power supplies. You can hear a motor running in the videos. We too will probably use gasoline motors ).